
 To measure holding torque on the old Science Center steppers, I attached an aluminum arm to one of the drums, keeping it as close to where the bobbin was epoxied to the shaft’s gear as I could. I notched the aluminum for the center of the drum, and attached it with a 4-40 machine screw. As there was almost no clearance between the nut and the motor, a judicious assortment of washers made sure the screw
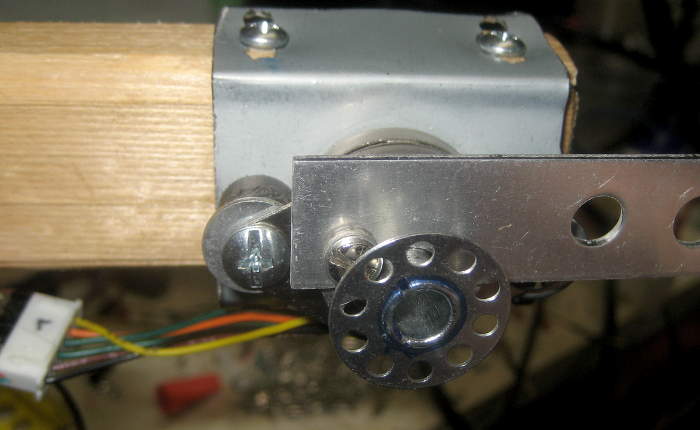
To measure holding torque on the old Science Center steppers, I attached an aluminum arm to one of the drums, keeping it as close to where the bobbin was epoxied to the shaft’s gear as I could. I notched the aluminum for the center of the drum, and attached it with a 4-40 machine screw. As there was almost no clearance between the nut and the motor, a judicious assortment of washers made sure the screw ![]() didn’t stick thru the nut. Since the holes in the front and rear bobbin ends were offset (what??), getting the screw started in the nut was considerably more of a challenge than I expected.
didn’t stick thru the nut. Since the holes in the front and rear bobbin ends were offset (what??), getting the screw started in the nut was considerably more of a challenge than I expected.
 With no power and the 16cm arm just resting on a little digital scale, I saw 5.6g force (ugh – yeah, I know) due to the weight of the arm. With full power (cooldown resistor shorted) and slowly lifting the scale and watching for the max value (yes, it went back down after the max), I saw 23.0g, for a component due to the stepper of 17.4g. At 16cm, that’s 278 g-cm or 3.85 oz-in of holding torque. (Yes, the attachment of the bar is backwards for testing this way. I’d originally planned to use a weight hung from the arm, but changed to the scale at the last minute. Fortunately, the screw was tight enough that it still worked.) Now I can shop for replacement steppers with a little science behind my selection!
With no power and the 16cm arm just resting on a little digital scale, I saw 5.6g force (ugh – yeah, I know) due to the weight of the arm. With full power (cooldown resistor shorted) and slowly lifting the scale and watching for the max value (yes, it went back down after the max), I saw 23.0g, for a component due to the stepper of 17.4g. At 16cm, that’s 278 g-cm or 3.85 oz-in of holding torque. (Yes, the attachment of the bar is backwards for testing this way. I’d originally planned to use a weight hung from the arm, but changed to the scale at the last minute. Fortunately, the screw was tight enough that it still worked.) Now I can shop for replacement steppers with a little science behind my selection!
And even more, with all the yak-shaving done of setting up, designing and doing this measurement, cleaning up, trying to resuscitate my new laptop – blown up setting this test up – giving up and ordering a replacement (at least it’s Black Friday!), and analyzing and documenting the problem with barrel connectors that led to its demise (here), now I can finally put all the drawbot junk that’s been cluttering up the family room for way too long away and out of sight. Yay!
Pingback: Drawbot string plotter | Jim's Projects